
في هذا الدرس سنتعلّم كيفية استخدام مستشعر MPU6050 وهو وحدة قياس القصور الذاتي (IMU) التي تحتوي على مقياس تسارع ثلاثي المحاور وجيروسكوب ثلاثي المحاور. سنقوم بقراءة زوايا الميل (Pitch, Roll, Yaw) باستخدام أردوينو أونو مع معايرة تلقائية للحصول على قراءات دقيقة.
المكونات المطلوبة
- مستشعر MPU6050 (GY-521)
- لوحة أردوينو أونو
- أسلاك توصيل (Jumper Wires)
- لوحة توصيل (Breadboard) - اختياري
ما هو MPU6050؟
MPU6050 هو مستشعر يجمع بين مقياس تسارع وجيروسكوب في شريحة واحدة. يستخدم بروتوكول I2C للاتصال مع الأردوينو، ويمكنه قياس:
- التسارع على المحاور الثلاثة (X, Y, Z)
- السرعة الزاوية (معدل الدوران) على المحاور الثلاثة
- الزوايا: Pitch (الميل الأمامي/الخلفي)، Roll (الميل الجانبي)، Yaw (الدوران الأفقي)
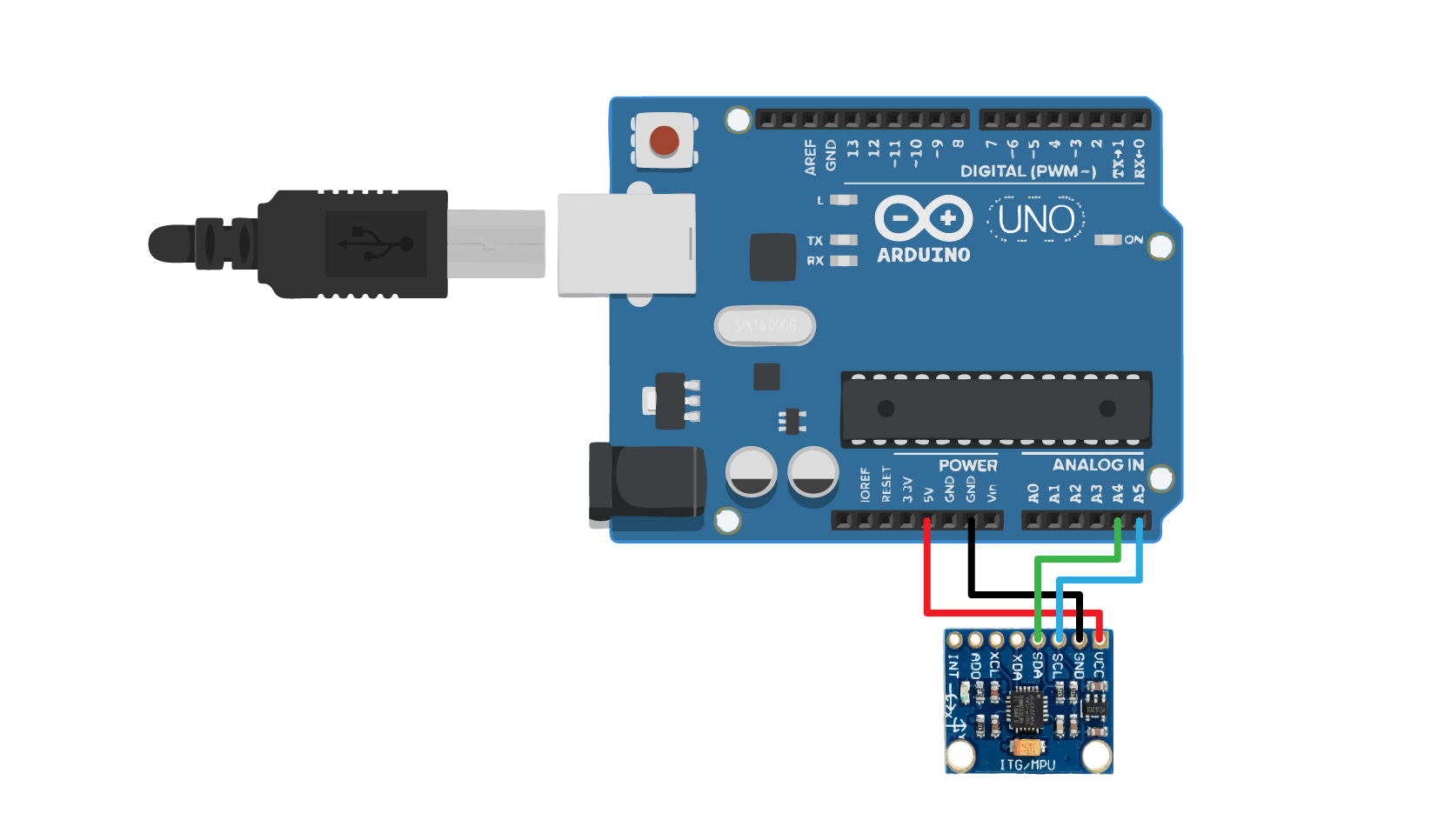
طريقة التوصيل
- توصيل VCC من MPU6050 إلى 5V أو 3.3V في الأردوينو
- توصيل GND من MPU6050 إلى GND في الأردوينو
- توصيل SCL من MPU6050 إلى A5 في الأردوينو (أونو) أو منفذ SCL
- توصيل SDA من MPU6050 إلى A4 في الأردوينو (أونو) أو منفذ SDA
برمجة الأردوينو
استخدم الكود التالي لقراءة الزوايا من MPU6050 مع معايرة تلقائية عند بدء التشغيل:
#include <Wire.h>
// MPU6050 I2C address
const int MPU = 0x68;
// Variables for gyroscope and accelerometer data
float AccX, AccY, AccZ;
float GyroX, GyroY, GyroZ;
float accAngleX, accAngleY, gyroAngleX, gyroAngleY, gyroAngleZ;
float roll, pitch, yaw;
float elapsedTime, currentTime, previousTime;
// Calibration offsets
float AccX_offset = 0, AccY_offset = 0, AccZ_offset = 0;
float GyroX_offset = 0, GyroY_offset = 0, GyroZ_offset = 0;
void setup() {
Serial.begin(9600);
Wire.begin();
// Initialize MPU6050
Wire.beginTransmission(MPU);
Wire.write(0x6B); // PWR_MGMT_1 register
Wire.write(0); // Set to zero (wakes up the MPU6050)
Wire.endTransmission(true);
// Configure Accelerometer Sensitivity - Full Scale Range (default +/- 2g)
Wire.beginTransmission(MPU);
Wire.write(0x1C);
Wire.write(0x00);
Wire.endTransmission(true);
// Configure Gyroscope Sensitivity - Full Scale Range (default +/- 250deg/s)
Wire.beginTransmission(MPU);
Wire.write(0x1B);
Wire.write(0x00);
Wire.endTransmission(true);
delay(20);
// Calibration
Serial.println("Starting calibration...");
Serial.println("Keep the sensor flat and still!");
delay(2000);
calibrateSensor();
Serial.println("Calibration complete!");
Serial.println("Starting angle measurements...");
delay(1000);
}
void calibrateSensor() {
int numReadings = 2000;
float sumAccX = 0, sumAccY = 0, sumAccZ = 0;
float sumGyroX = 0, sumGyroY = 0, sumGyroZ = 0;
for (int i = 0; i < numReadings; i++) {
// Read accelerometer data
Wire.beginTransmission(MPU);
Wire.write(0x3B);
Wire.endTransmission(false);
Wire.requestFrom(MPU, 6, true);
float ax = (Wire.read() << 8 | Wire.read()) / 16384.0;
float ay = (Wire.read() << 8 | Wire.read()) / 16384.0;
float az = (Wire.read() << 8 | Wire.read()) / 16384.0;
// Read gyroscope data
Wire.beginTransmission(MPU);
Wire.write(0x43);
Wire.endTransmission(false);
Wire.requestFrom(MPU, 6, true);
float gx = (Wire.read() << 8 | Wire.read()) / 131.0;
float gy = (Wire.read() << 8 | Wire.read()) / 131.0;
float gz = (Wire.read() << 8 | Wire.read()) / 131.0;
sumAccX += ax;
sumAccY += ay;
sumAccZ += az;
sumGyroX += gx;
sumGyroY += gy;
sumGyroZ += gz;
// Progress indicator
if (i % 200 == 0) {
Serial.print(".");
}
delay(3);
}
Serial.println();
// Calculate average offsets
AccX_offset = sumAccX / numReadings;
AccY_offset = sumAccY / numReadings;
AccZ_offset = (sumAccZ / numReadings) - 1.0; // Z should be 1g when flat
GyroX_offset = sumGyroX / numReadings;
GyroY_offset = sumGyroY / numReadings;
GyroZ_offset = sumGyroZ / numReadings;
// Display calibration values
Serial.println("Calibration offsets:");
Serial.print("AccX: "); Serial.print(AccX_offset);
Serial.print(" | AccY: "); Serial.print(AccY_offset);
Serial.print(" | AccZ: "); Serial.println(AccZ_offset);
Serial.print("GyroX: "); Serial.print(GyroX_offset);
Serial.print(" | GyroY: "); Serial.print(GyroY_offset);
Serial.print(" | GyroZ: "); Serial.println(GyroZ_offset);
}
void loop() {
// Read accelerometer data
Wire.beginTransmission(MPU);
Wire.write(0x3B); // Start with register 0x3B (ACCEL_XOUT_H)
Wire.endTransmission(false);
Wire.requestFrom(MPU, 6, true);
AccX = (Wire.read() << 8 | Wire.read()) / 16384.0 - AccX_offset;
AccY = (Wire.read() << 8 | Wire.read()) / 16384.0 - AccY_offset;
AccZ = (Wire.read() << 8 | Wire.read()) / 16384.0 - AccZ_offset;
// Calculate pitch and roll from accelerometer
accAngleX = (atan(AccY / sqrt(pow(AccX, 2) + pow(AccZ, 2))) * 180 / PI);
accAngleY = (atan(-1 * AccX / sqrt(pow(AccY, 2) + pow(AccZ, 2))) * 180 / PI);
// Read gyroscope data
previousTime = currentTime;
currentTime = millis();
elapsedTime = (currentTime - previousTime) / 1000; // Convert to seconds
Wire.beginTransmission(MPU);
Wire.write(0x43); // Gyro data first register address 0x43
Wire.endTransmission(false);
Wire.requestFrom(MPU, 6, true);
GyroX = (Wire.read() << 8 | Wire.read()) / 131.0 - GyroX_offset;
GyroY = (Wire.read() << 8 | Wire.read()) / 131.0 - GyroY_offset;
GyroZ = (Wire.read() << 8 | Wire.read()) / 131.0 - GyroZ_offset;
// Currently the raw values are in degrees per seconds, we need to multiply by seconds (elapsedTime)
gyroAngleX = gyroAngleX + GyroX * elapsedTime;
gyroAngleY = gyroAngleY + GyroY * elapsedTime;
yaw = yaw + GyroZ * elapsedTime;
// Complementary filter - combine accelerometer and gyro angle values
roll = 0.96 * gyroAngleX + 0.04 * accAngleX;
pitch = 0.96 * gyroAngleY + 0.04 * accAngleY;
// Update gyro angles with complementary filter
gyroAngleX = roll;
gyroAngleY = pitch;
// Print the values in the format: pitch, roll, yaw
Serial.print(pitch);
Serial.print(", ");
Serial.print(roll);
Serial.print(", ");
Serial.println(yaw);
delay(20); // Adjust delay as needed for your application
}
كيفية استخدام الكود
- قم بتحميل الكود إلى الأردوينو
- افتح شاشة المراقبة التسلسلية (Serial Monitor) على سرعة 9600
- ضع المستشعر على سطح مستوٍ ولا تحركه أثناء عملية المعايرة
- انتظر حتى تظهر رسالة "Calibration complete!"
- ستبدأ القراءات بالظهور بالصيغة:
pitch, roll, yaw
فهم القراءات
- Pitch (الميل الأمامي/الخلفي): زاوية الميل للأمام أو للخلف (حول المحور X)
- Roll (الميل الجانبي): زاوية الميل لليمين أو اليسار (حول المحور Y)
- Yaw (الدوران الأفقي): زاوية الدوران حول المحور العمودي (حول المحور Z)
جميع القراءات تكون بوحدة الدرجات (Degrees).
نصائح مهمة
- تأكد من ثبات المستشعر تماماً أثناء عملية المعايرة للحصول على أفضل دقة
- إذا لاحظت قراءات غير دقيقة، اضغط على زر Reset في الأردوينو لإعادة المعايرة
- قراءة Yaw قد تنحرف مع الوقت لأنها تعتمد فقط على الجيروسكوب
- يستخدم الكود مرشح تكاملي (Complementary Filter) لدمج بيانات المقياسين للحصول على قراءات مستقرة
- يمكنك تغيير نسبة المرشح (0.96/0.04) حسب احتياجك للاستقرار أو الاستجابة السريعة
التطبيقات العملية
يستخدم مستشعر MPU6050 في العديد من المشاريع مثل:
- الطائرات المسيّرة (Drones) لتحقيق التوازن
- الروبوتات ذاتية التوازن
- أنظمة التتبع والتحكم بالحركة
- أجهزة الواقع الافتراضي (VR)
- منصات التثبيت (Gimbals)
الخلاصة
باستخدام هذا الكود، يمكنك قراءة زوايا الميل من مستشعر MPU6050 بدقة عالية مع معايرة تلقائية. هذا المستشعر قوي ومتعدد الاستخدامات ويعتبر من أساسيات مشاريع الروبوتات والطيران.